Build
- Open a bash shell under Cygwin
- Run at the command line : make poll
Start Program
- Start the command line program poll.exe
- Start the perl script graph.pl
GUI
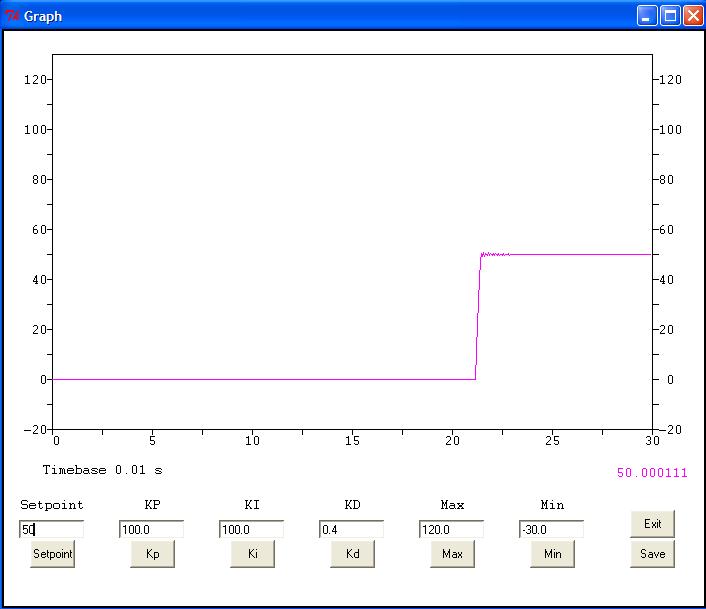
Tuning
- Set Ki, Kd to 0
- Make Setpoint 50 (%)
- Set Kp to 1
- Increase Kp until response is unstable/oscillating. This can be by doubling, or logarithmically, that is, go up by 1,2,5,10,20,50 etc. When the response oscillates more, back off to the previous 'max'
- Increase Ki similarly. Raise Ki to move the steady-state value. Increase Ki until the response, is unstable or until Ki is about equal to Kp.
- Set Kd to 1. Increase or attenuate (go to 0.5,.25) and see if this limits the ringing on the leading edge. If Kd =0 is the better response, set to 0.
- Check the response at FS and 0.
- For max response at FS and 0, increase (controller) MAX and MIN beyond 100 and 0 respectively. The current plant definition is a low-pass filter, to speed up the response, the drive has to be greater than FS = 100, or less than -FS =0, otherwise the response is a slower exponential.
Exit Program
- Currently, the only way to stop the program is CTRL-C.